Разработка интеллектуального контроллера электропривода для электросамокатов с поддержкой CAN/UART и мобильной интеграцией Подробнее »
Разработка высокопроизводительного привода PMSM для электротранспорта с EKF и HFI на базе Xilinx Zynq-7020 Подробнее »
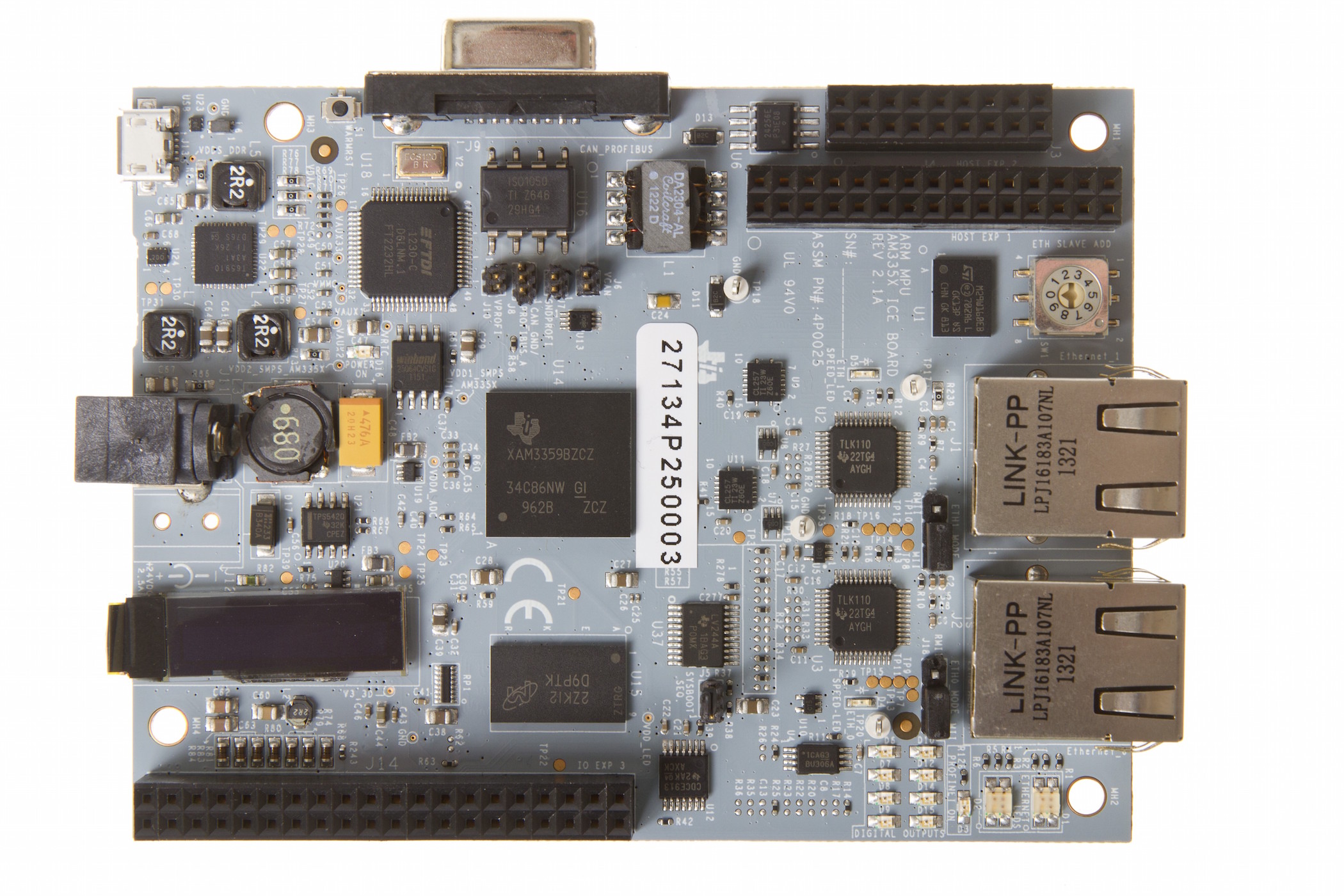
Автономная мобильная платформа (AMR) с разделённой архитектурой управления: Xilinx Zynq 7010 + NVIDIA Jetson Orin + ROS2 Подробнее »
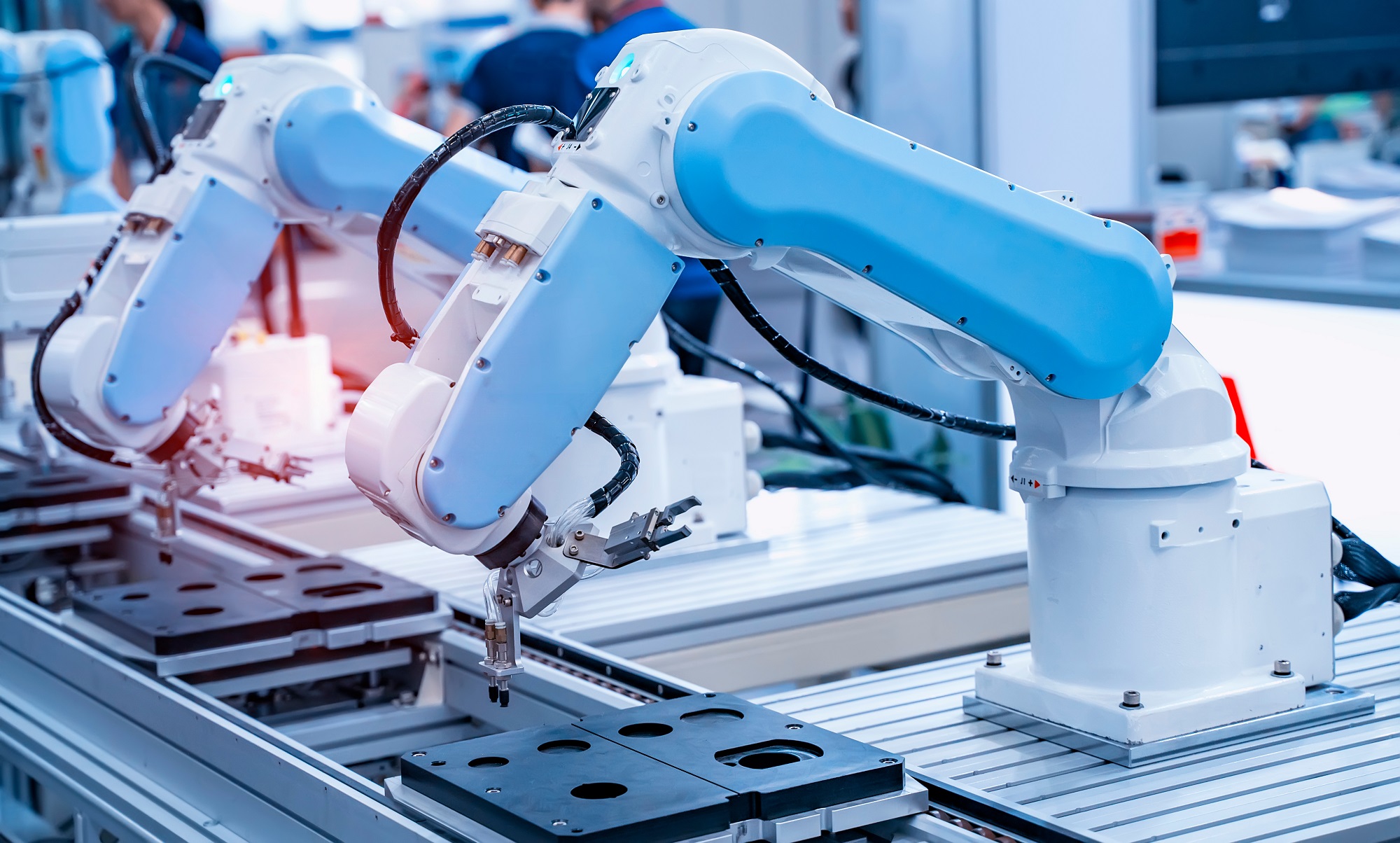
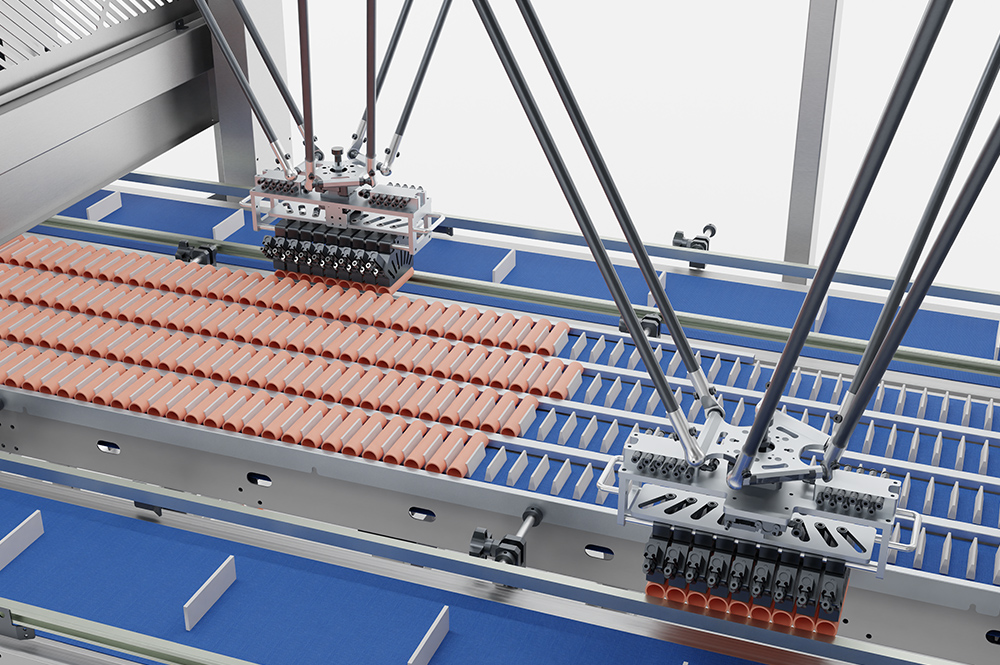
Промышленный манипулятор, управляемый контроллером на базе ROS2 с EtherCAT-мастером для связи с сервоприводами Подробнее »
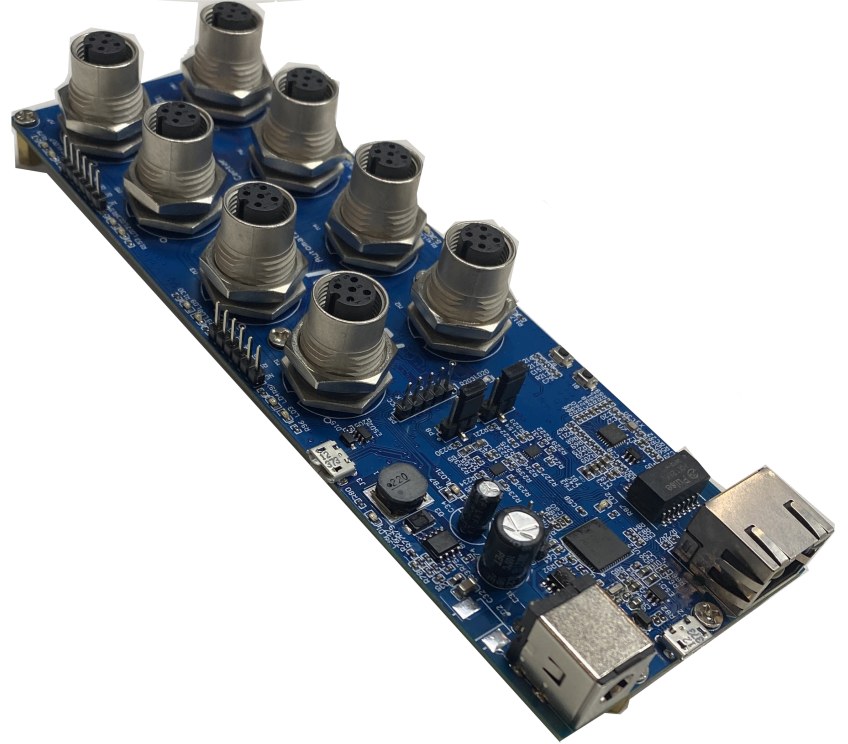
EtherCAT-модуль ввода-вывода с 16 изолированными цифровыми входами и 16 изолированными цифровыми выходами Подробнее »