Промышленный манипулятор, управляемый контроллером на базе ROS2 с EtherCAT-мастером для связи с сервоприводами
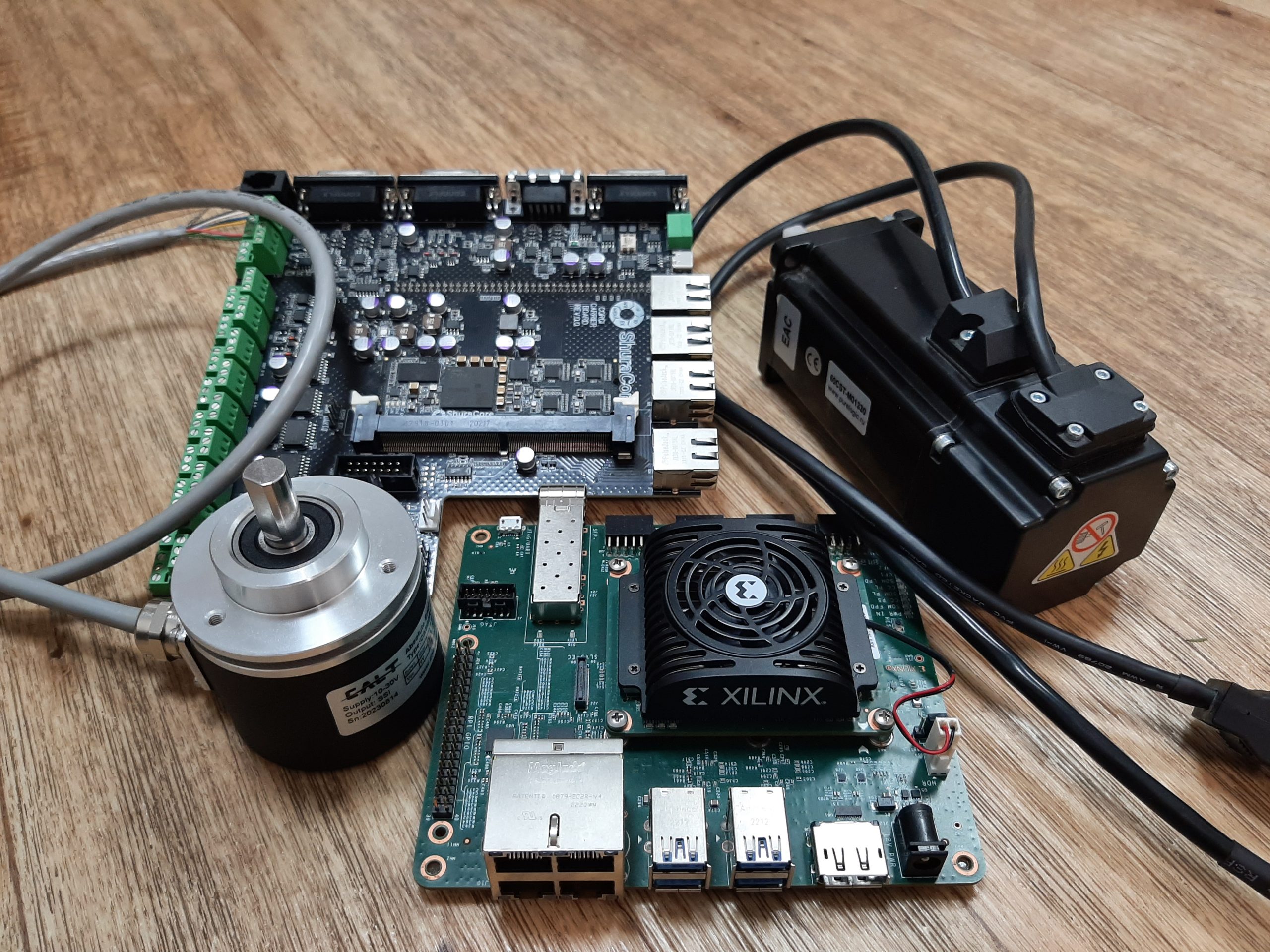
Структура аппаратной платформы
Система управления манипулятором реализована на базе Xilinx Kria KR260 Robotics Starter Kit (Kria K26 SOM), построенной на SoC Zynq UltraScale+ MPSoC со следующими компонентами:
Кластер Cortex-A53 — выполнение высокоуровневых ROS2-узлов
Кластер Cortex-R5 — цикл реального времени, EtherCAT Master, задачный планировщик
Разделение задач позволяет реализовать жесткие временные ограничения при расчете траекторий и управлении сервоприводами (сервоусилителями).
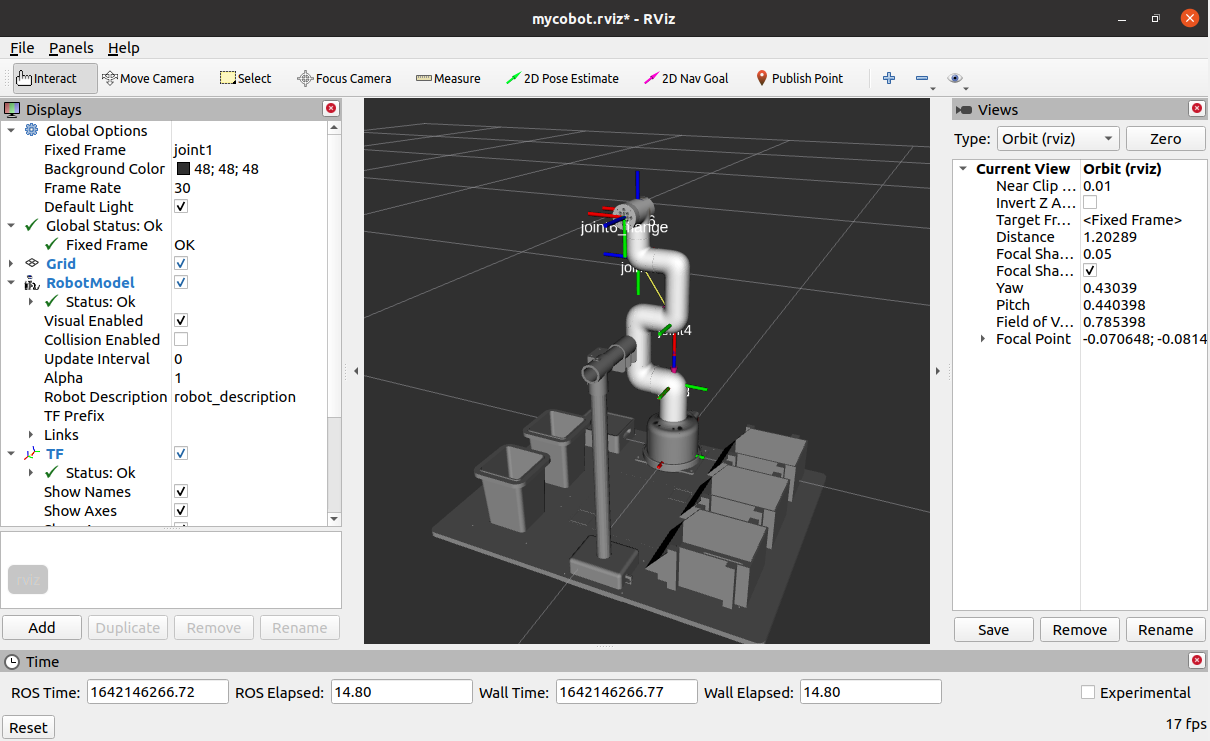
Интеграция кинематической модели и ROS2
Кинематическая структура 6 DOF манипулятора описывается в формате URDF:
Звенья (link) и сочленения (joint) — кинематическая структура
Геометрию звеньев для визуализации и коллизий
Массу, центры масс и инерции звеньев
Расположение сочленений и оси вращения (origin, axis)
Ограничения по углам, скорости и моменту (limit)
Фланец инструмента (TCP)
Далее используется цепочка ROS-инструментов:
Gazebo — динамическая симуляция робота
MoveIt 2 — планирование и генерация траекторий
RViz — визуализация состояния и траекторий
Генерируемые профили движения передаются на Kria K26 SoM и используются для управления реальными приводами.
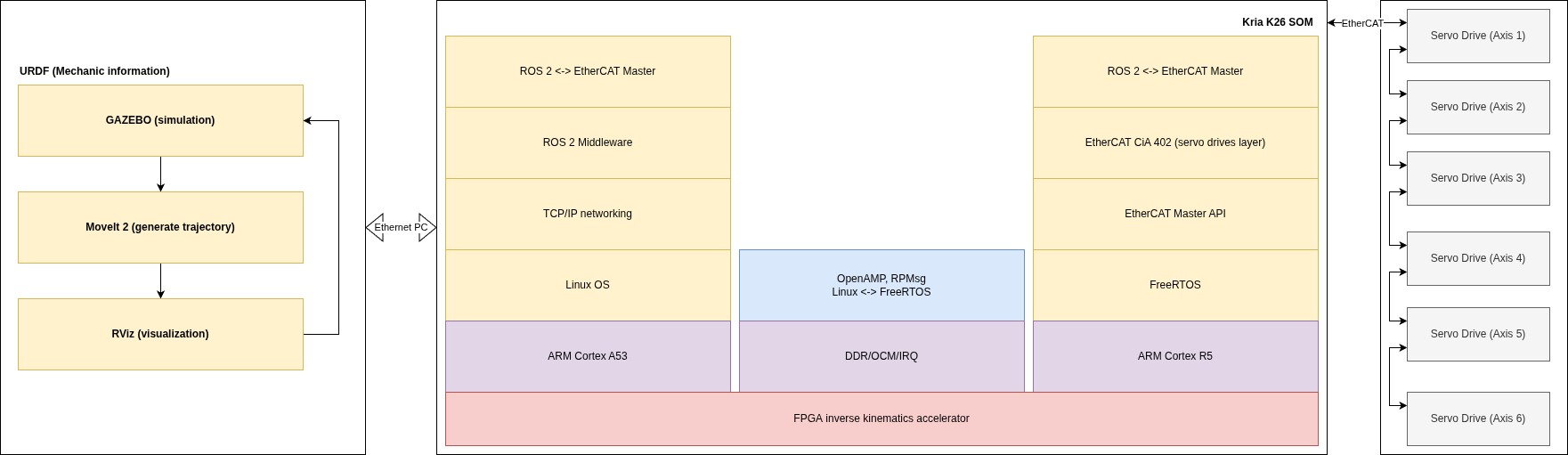
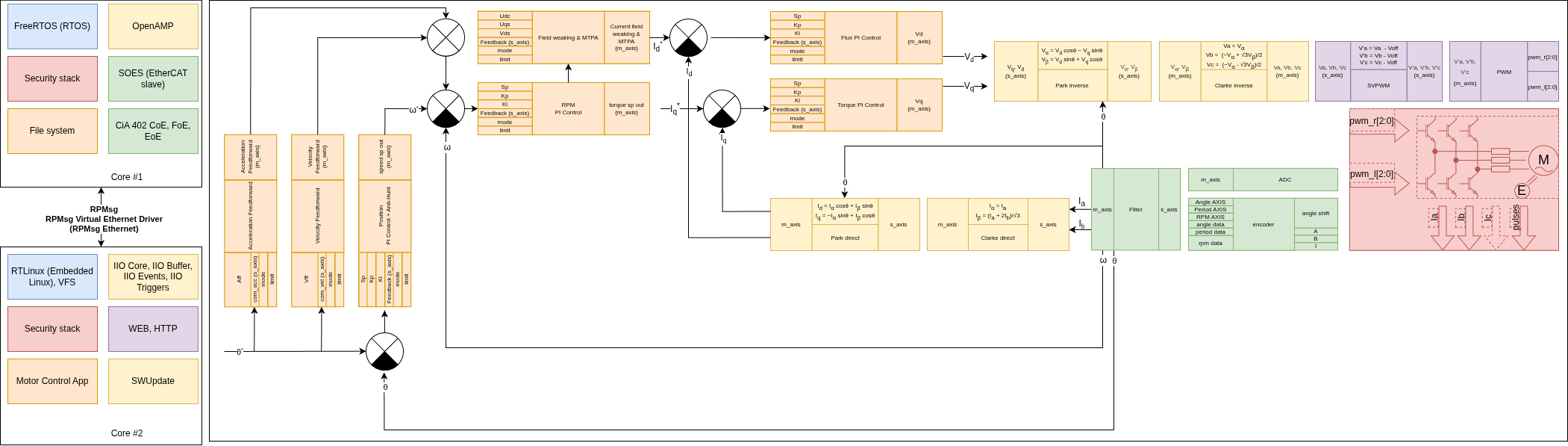
Архитектура ПО
Программная архитектура включает следующие уровни:
Уровень Linux (пользовательский ROS2, Linux, Cortex A53)
ROS2 nodes
DDS middleware
Interface node EtherCAT <-> ROS2
IPC через OpenAMP
Уровень RTOS (реальное время, Cortex R5)
FreeRTOS
EtherCAT Master stack, SOEM
Профили CiA-402 (position/velocity/torque)
Синхронизация приводов по оси
Уровень FPGA (PL)
аппаратный ускоритель (обратная кинематика)
Клиент и бизнес проблема
Клиент — производитель промышленных роботизированных систем: манипуляторы 6 DoF, сборочные ячейки, системы паллетизации и манипуляторы для машиностроительной отрасли.
Ключевыми требованиями к системе управления являются:
Жесткий реального времени цикл управления
Низкие задержки при обмене с сервоприводами
Высокая точность кинематики и калибровки
Возможность интеграции с ROS2
Основные выявленные проблемы существующих решений:
Высокая задержка планирования траекторий
Отсутствие жесткой синхронизации сервоприводов в многоосных кинематиках
Реализация EtherCAT-мастера в userspace Linux вносит недетерминированность в работу системы
Значительный разрыв между симуляцией ROS2 и работой с реальными роботизированными системами усложняет интеграцию
Решение
Реализована платформа управления промышленным манипулятором 6 DoF на базе:
Мы используем файлы cookie, чтобы обеспечить вам максимальное удобство на нашем веб-сайте. Если вы продолжите использовать этот сайт, мы будем считать, что вы им довольны.